Asimo presentation in Paris 2002
Following a research program initiated in 1986 with the P-0 prototype, Honda presented in 2000 -just in time for the 21st century- the Asimo humanoid robot.
Honda’s ambitions on robotics are multiple : in a country where the population grows older year by year, the problem of assisting older people in their everyday life will become more and more accurate. Robots are thought of by many as one of the ways of solving this problem. Yet the technology still has lots to prove before accessing that kind of uses…
In what sounds more like a marketting baseline, Honda mentions “the power of dreams” as one of the reasons for the existence of the Humanoid Robot project. By that we should understand : creating humanoid robots has long been a dream , and making dreams come true is Honda’s moto.
Then again, Honda also states that robots will become an important part of our life within the new century; and they will thus represent a significant market, of which Honda intends to take it’s share.
After 14 years of developments, mostly focused on the dynamics of a robotic humanoid body, Asimo is the first humanoid robot to be actually available on the market (rental only, and at a tremendeous cost too). It is said that IBM, in Japan, uses an Asimo as a host in an IBM plant lobby.
So what’s the big deal with humanoid robots?
As i’ve mentionned, humanoids robots are intended to share humans life. It is thus important for them to be able to evolve in an everyday human environment. Imagine a robot that should “live” in an appartement. If it was equiped with wheels, it would be basically able to wander around, but only until it would meet stairs or steps. Take it out of the appartement, and the same limitations would apply in an urban environment. As a matter of fact, humans have legs, and their environment is designed accordingly. This is why a robot with legs seems more adapted to sharing lifespace with humans.
The same thoughts apply to the upper structure of the robot. If you want your robot to be able to actually walk around in your appartment, it should be able to open doors. You would then have a choice : adapt your entire appartment to make your robot able to open adapted doors by the use of a specific system; or include in your robot design some kind of device that would deal with common doors. If you do that, you may want to also equip your robot with devices that could take/move/transport objects. Also, it could be useful that your robot would be able to push buttons. Again, the human environment is adapted to human bodies, and human have arms and hands. So should your robot too.
Click here to view Asimo walking down a stair (2.66Mo AVI video)
Another important issue about designing a humanoid robot is the social interactions with humans. Many research projects around the world focus on that question : what will make a robot socially acceptable in a human surrounding?
Some projects, like Sony’s world famous Aibo robot dog and Asimo use the following approach : it is important not to disguise Artificial Intelligence into what it is not. It is thus important to give the robot an external appearance that would fit it’s actual potential. In human interactions, people usually expect different kind of response from different kind of interactors. Interacting with the surrounding world, one will not expect the same kind of response from a dog, a business man in suit, a vending machine or a child. The robot has the potential ability to adopt any of those outfits. In order to have the robot accepted in the everyday life of a human, the robot design should be carefully designed accordingly to it’s actual potential, it’s goal and it’s environment.
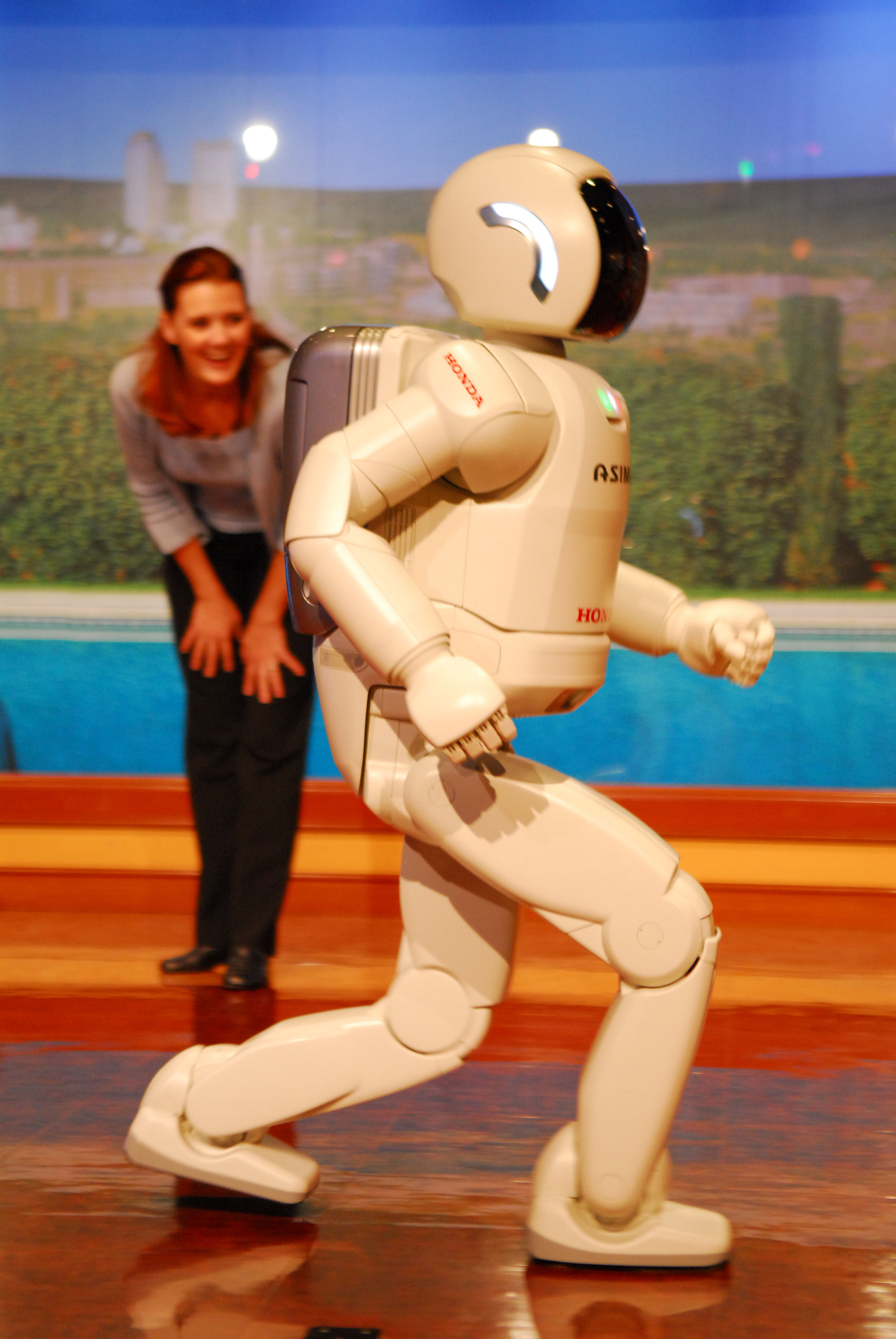
Asimo is not a toy, and it is not an actual human. It’s body is the size of a small adult and it’s appearance is sober and soft, yet functionnal. It’s “face” is both robotic (as the helmet suggests) and familiar, with the symbolics of the big round eyes suggesting that the robot is like a child that has to learn it’s environment.
If the first version of Asimo was basically a smaller-sized version of the earlier P-2 and P-3 robots; Honda now focus on breathing artificial intelligence into the newer versions.
The first evolution is the “i-Walk” technology. Whereas it used to be remote-controlled, Asimo’s walking technology is now able of anticipating the robot’s next moves, thus controlling the walking systems in a much more “natural” way. AI systems also include image and voice recognition (asimo is able to turn to someone who speaks to it, and recognize the person. It will also recognize certain gestures). Asimo will obei to several orders : ordering “come here” while pointing to a location will make Asimo move to the designated location and turn to the person who ordered it.



 Invitation to the opening ceremony of the Institute of Cognitive and robotics “, the presentation of the new generation ASIMO, and to subsequent press conference
Invitation to the opening ceremony of the Institute of Cognitive and robotics “, the presentation of the new generation ASIMO, and to subsequent press conference In the USA, most federal agencies support programs in robotics. For example, with NASA missions and Sojourner Martiennes, NSF whose various programmes display thematic Robea, mainly in the division CISE ($ 190M budget in 2001), or DARPA. Most American universities have teams and laboratories in the field (particularly those referenced on this site), like the Robotics Institute of Carnegie-Mellon University, which concentrates more than 200 researchers in 25 projects ranging from exploration or planetary polar driving. It should be pointed out effort R & D industrial robotics in the USA. Thus the work of CMU develops and builds on the Robotics Consortium Pittsburgh.The Japan mobilizes ambitious projects in the field. The program launched in Humanoid Robot 98 (50 million over 5 years) is significant research efforts of this country, efforts that extend through activities of industrial R & D intensive (Sony, Honda, etc).
In the USA, most federal agencies support programs in robotics. For example, with NASA missions and Sojourner Martiennes, NSF whose various programmes display thematic Robea, mainly in the division CISE ($ 190M budget in 2001), or DARPA. Most American universities have teams and laboratories in the field (particularly those referenced on this site), like the Robotics Institute of Carnegie-Mellon University, which concentrates more than 200 researchers in 25 projects ranging from exploration or planetary polar driving. It should be pointed out effort R & D industrial robotics in the USA. Thus the work of CMU develops and builds on the Robotics Consortium Pittsburgh.The Japan mobilizes ambitious projects in the field. The program launched in Humanoid Robot 98 (50 million over 5 years) is significant research efforts of this country, efforts that extend through activities of industrial R & D intensive (Sony, Honda, etc). 